




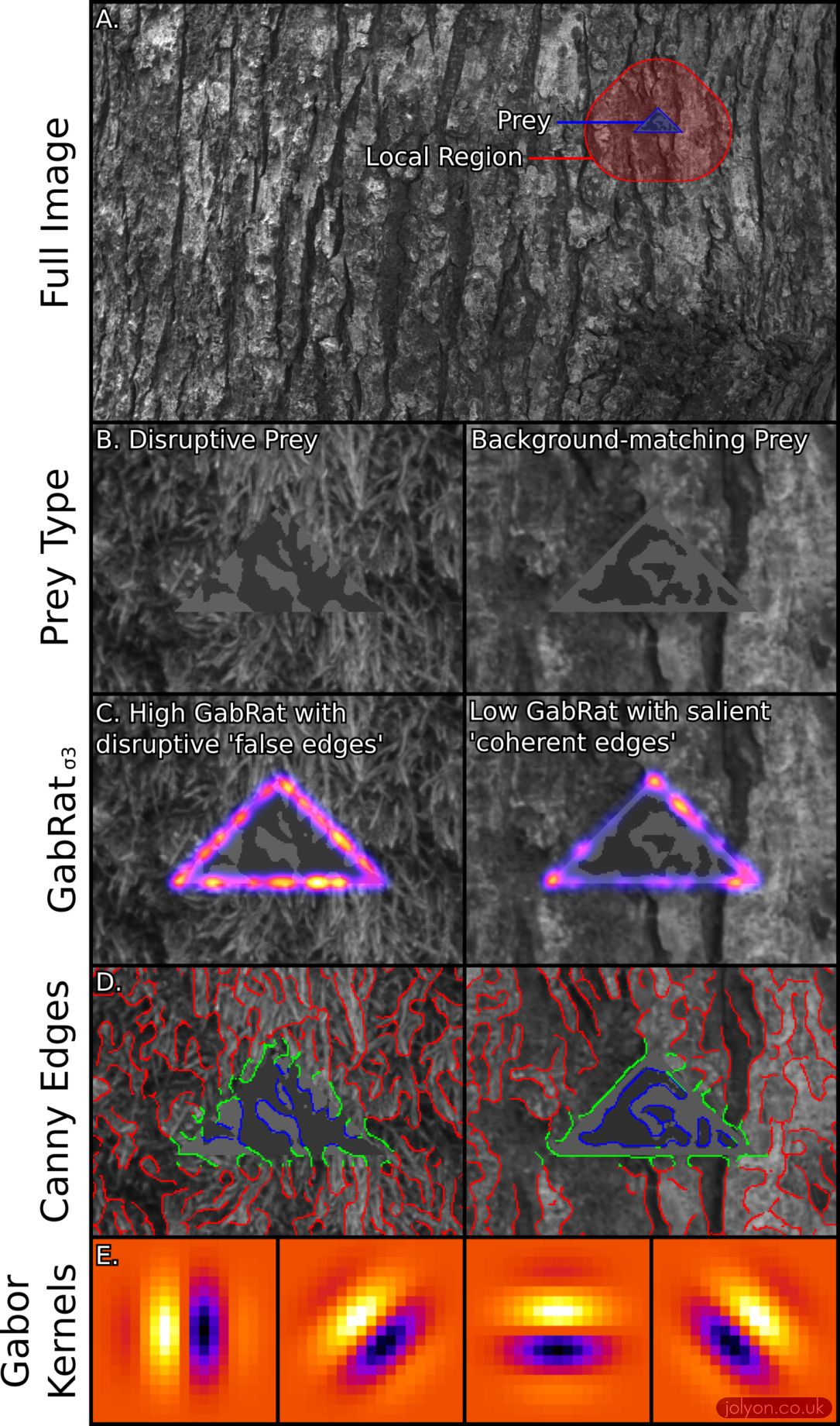
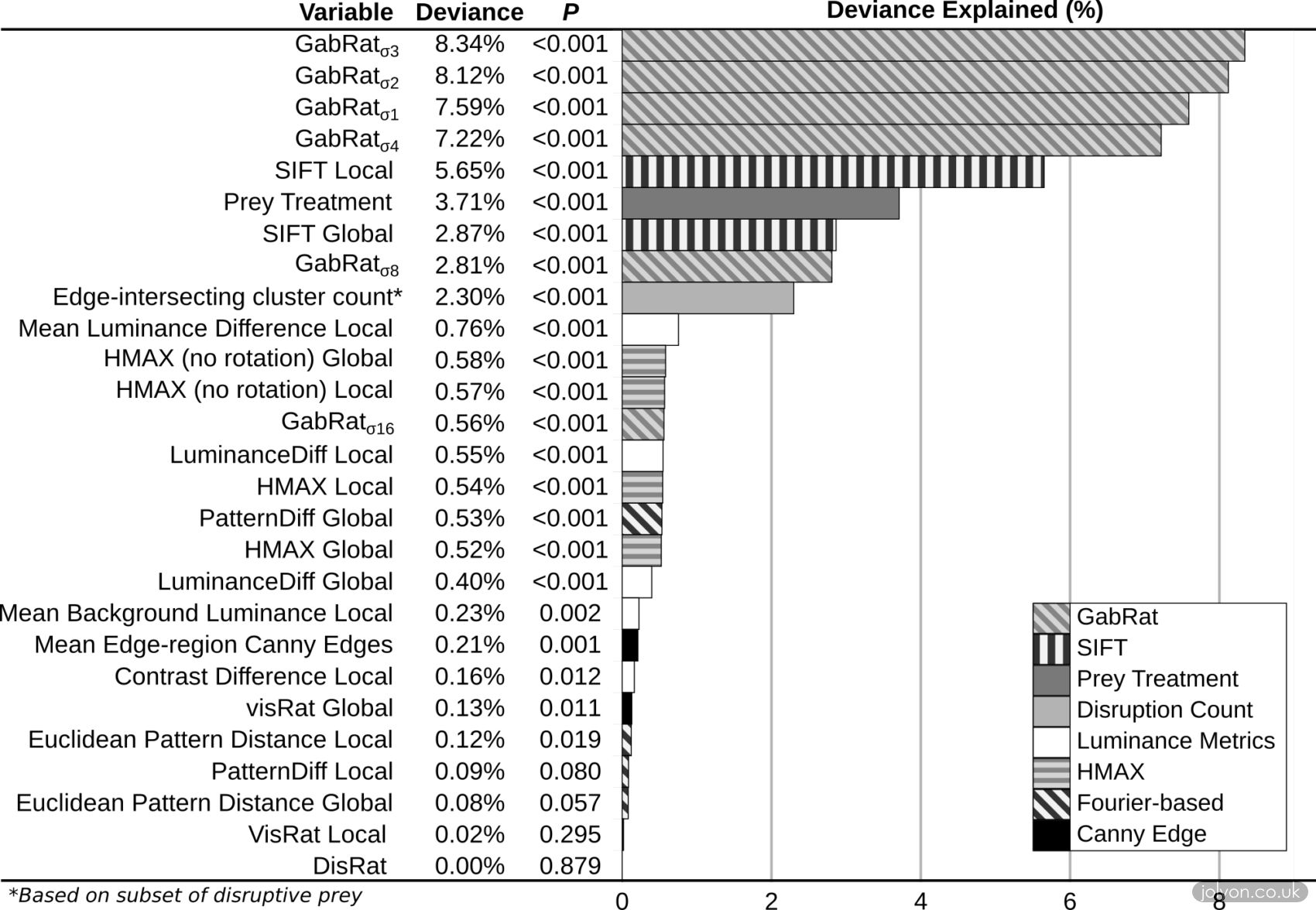
Estimating how visible something is against its background is essential in many studies of animal colouration, signalling and camouflage. There are many models and methods used to estimate a target’s visibility; some of these methods use very simple luminance or pattern measures, while others use more complex feature detection algorithms. In our new paper just out, we tested how well a range of methods predicted human capture times for artificially generated camouflaged moths, similar to those in this online game. Something known to make targets easier to find is the visibility of their outlines, and high contrast ‘disruptive’ patterns are thought to break up edges and make the target’s outline more difficult to see. We devised a new method for measuring edge disruption based on the intensity and direction of perceived edges versus actual edges around the target’s outline. This new measure outperformed all other methods even though it measured a smaller region of the image than any other measure, making it highly computationally efficient.
Be First to Comment